 Hydravions, drones et autres engins radiocommandés sur Erdre et environs
Hydravions, drones et autres engins radiocommandés sur Erdre et environs Accueil > les hélicoptères > installation du contrôleur de vol pour hélico FlyWing H1 dans un (...)
 installation du contrôleur de vol pour hélico FlyWing H1 dans un Trex500
installation du contrôleur de vol pour hélico FlyWing H1 dans un Trex500
jeudi 8 juillet 2021, par
Sommaire :![]() 1 le contrôleur H1 de Flywing
1 le contrôleur H1 de Flywing![]() 2 le branchement des servos et du récepteur sur le H1
2 le branchement des servos et du récepteur sur le H1![]() 3 la création du modèle sur la radiomaster TX16S
3 la création du modèle sur la radiomaster TX16S![]() 4 la programmation du H1 avec le logiciel H1_Heli_en.exe
4 la programmation du H1 avec le logiciel H1_Heli_en.exe![]() 5 comment décoller avec le H1
5 comment décoller avec le H1![]() 6 astuce si l’hélico se pose aussitôt décollé
6 astuce si l’hélico se pose aussitôt décollé
-------------------0--------------------
FlyWing diffuse de manière discrète,
un UH1

un Bell tripale de qualité maquette en taille 450/500,

ainsi qu’un hélico d’acro ,

tous équipés du contrôleur à GPS H1, .

Pourtant ces appareils sont révolutionnaires !
N’importe qui peut les piloter comme un drone en mode GPS, avec retour home, décollage et atterrissage automatiques, stabilité totale sans toucher aux commandes.
Mais en mode 3D, le pilote expert peut donner libre cours à ses capacités, toute la voltige y passe . C’est le contrôleur H1 qui permet cela.
Le H1 est vendu séparément. Il arrive dans une boîte luxueuse avec un sachet de fixation du GPS en plus..

sur la boîte, les caractéristiques du module. ici on peut voir qu’il admet une tension de 5 à 8 volts

le module en aluminium de très bonne qualité visuelle est bien calé avec son GPS. En dessous, le câble USB3 pour la programmation.

- Le H1 maintient l’hélico en stationnaire comme un drone. Il permet le décollage automatique, l’atterrissage automatique, le retour-home, le vol dos, le vol automatique en rond et en 8, le pilotage constant avec maintien de l’altitude et rétablissement et arrêt en l’air dès qu’on lâche les manches, tout ça pour les débutants ou le vol maquette. Un inter peut le mettre en mode 3D avec tout le pilotage classique d’un hélico d’acro...sauf que si vous repassez en mode GPS, il se remet à plat et en stationnaire parfait !![]() la programmation se fait par le logiciel H1_Heli_en.exe en libre service sur le site Flywing,
la programmation se fait par le logiciel H1_Heli_en.exe en libre service sur le site Flywing,
Vous pouvez programmer pratiquement n’importe quel hélico en manuel, ou choisir dans une liste d’hélico courants ALIGN, GAUI, ...

Le logiciel vous donne la composition servos/motorisation typique de l’hélico choisi. vous pouvez accepter ou choisir la configuration manuelle du logiciel.
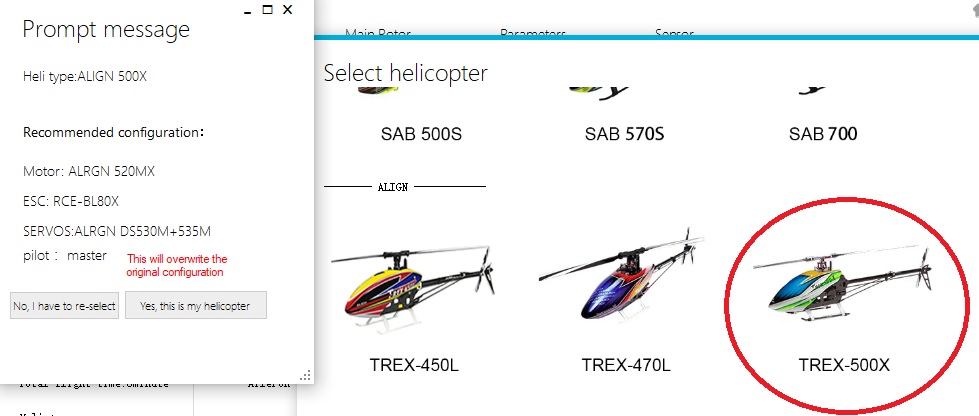
Ici, la configuration de mon 500x ne correspond pas complètement, mais je la choisis car ma config est :
moteur et esc RCM-BL500/RCE-BL80X
mes servos DS-525 et 3 DS-515
Donc la config est similaire, on verra dans les autres réglages si tout est conforme...
faites un petit tour sur le site Flywing ici par curiosité
J’ai déjà monté ce merveilleux module dans un BLADE 450 pour tester.
C’est tellement sécurisant et facile, que j’en ai commandé un 2ème et je décris ici comment je l’installe dans un ALIGN TRX500 Dominator

avec un fuselage Align MD500.

-étape 1 : sortir la mécanique Dominator du fuselage.![]() Pales et anti-couple à torque-tube, s’en vont rapidement.
Pales et anti-couple à torque-tube, s’en vont rapidement.
La mécanique ne tient dans le fuselage que par 2 vis à l’avant

et une butée à l’arrière

étape 2 : enlever le Micro-BeastX et le récepteur Spektrum et les remplacer par le H1 et le récepteur Sbus S161 pour RADIOMASTER
Ici l’ancien montage avec Micro-Beastx et récepteur Spektrum

maintenant remplacés par le H1 et le récepteur Sbus Radiomaster S161 car je suis heureux utilisateur depuis plus d’un an d’une TX16S .

reste à faire un beau câblage des servos en suivant la notice (lien)

Le câblage est terminé. le GPS est positionné provisoirement.
Notez que le moins (-) de chaque prise servo est vers le haut, contrairement au BeastX ou au 3GX.


-étape 3 : créer le modèle sur l’émetteur et binder le récepteur.
La RADIOMASTER TX16S fonctionne en OPENTX. Les menus sont donc comparables à la Taranis .
Il faut juste connaître les touches à utiliser. Avec un peu de pratique et l’aide d’un habitué, vous verrez que cette radio est facile à comprendre et à programmer et que sa version d’OPENTX n’est limitée que par votre imagination !
Pour créer et programmer le H1 vous aurez besoin des touches suivantes :

![]() appui long sur la mollette pour le menu selection des modèles
appui long sur la mollette pour le menu selection des modèles

![]() appui court sur la mollette pour créer un nouveau modèle
appui court sur la mollette pour créer un nouveau modèle

![]() le modèle est créé. Vous allez pouvoir le modifier, lui attribuer une photo, des inters, binder un récepteur, un chrono, afficher l’état des batteries, de la puissance de réception...
le modèle est créé. Vous allez pouvoir le modifier, lui attribuer une photo, des inters, binder un récepteur, un chrono, afficher l’état des batteries, de la puissance de réception...

![]() pour modifier le modèle, appuyez sur le bouton MDL, appui long
pour modifier le modèle, appuyez sur le bouton MDL, appui long

![]() utilisez la mollette pour naviguer dans la page et valider par un appui les choix. Si vous vous trompez ou pour terminer un choix, utilisez la touche annulation RTN
utilisez la mollette pour naviguer dans la page et valider par un appui les choix. Si vous vous trompez ou pour terminer un choix, utilisez la touche annulation RTN![]() programmez le nom et le chrono puis descendez pour choisir le récepteur de votre hélico (ici un R161 Radiomaster qui utilise le programme FRSKY D16
programmez le nom et le chrono puis descendez pour choisir le récepteur de votre hélico (ici un R161 Radiomaster qui utilise le programme FRSKY D16![]() procédez au bindage et choisissez le type de failsafe plus bas encore.
procédez au bindage et choisissez le type de failsafe plus bas encore.

Pour binder le R161, il faut brancher la batterie de l’hélico en maintenant le bouton Bind du récepteur enfoncé. Vous appuyez alors sur le menu Bind de l’émetteur.
N’oubliez pas avant cela de déconnecter les fils du moteur et d’enlever les pales de votre hélico !!!
-étape 4 : passer le H1 sur PC pour le configurer.
Le Dominator était déjà bien réglé avec son micro-beastX-plus. Il volait bien donc les neutres des 4 servos et du cyclique sont bons. C’est la première chose à faire lorsque vous réglez un hélico.
![]() TX allumé, lipo branchée, j’attends l’initialisation du H1. le plateau monte et descend comme sur les autres contrôleurs.
TX allumé, lipo branchée, j’attends l’initialisation du H1. le plateau monte et descend comme sur les autres contrôleurs.![]() je branche le câble USB3 fourni sur le H1 puis sur le PC .
je branche le câble USB3 fourni sur le H1 puis sur le PC .![]() je lance le logiciel H1_Heli_en.exe, téléchargé sur le site flywingrc.com (lien ici)
je lance le logiciel H1_Heli_en.exe, téléchargé sur le site flywingrc.com (lien ici)
![]() Je suis en win10. Le driver est installé automatiquement et rapidement. Le logiciel me propose la connexion sur le COM5. Je clique et j’attends la connexion pendant une vingtaine de secondes.
Je suis en win10. Le driver est installé automatiquement et rapidement. Le logiciel me propose la connexion sur le COM5. Je clique et j’attends la connexion pendant une vingtaine de secondes.

* Pendant ce temps, je remarque les valeurs de gaz du rotor (pas besoin d’Idle, le moteur est géré par le H1), et du gyro (ici en headlock puisque >50%)
- connecté, je clique sur "NEW HELICO" et le logiciel me propose une liste de pré-réglages. je clique sur mon 500X, et les caractéristiques des servos, du moteur et de l’esc sont proposés.

Bien que légèrement différents, j’accepte cette configuration type. Sinon il me faudrait choisir un confiruration manuelle comme pour mon BLADE450. Je suis un peu flèmard ! Go !

![]() En manoeuvrant le TX, je vérifie que les mouvements correspondent bien à ceux de l’écran, vers l’avant, l’Arrière, à droite, à gauche. je vérifie aussi les interrupteurs des modes de vol.
En manoeuvrant le TX, je vérifie que les mouvements correspondent bien à ceux de l’écran, vers l’avant, l’Arrière, à droite, à gauche. je vérifie aussi les interrupteurs des modes de vol.
J’ai mis les étiquettes livrées avec le H1 près des inter programmés


Ils correspondent aux canaux indiqués dans la doc en anglais

![]() En cliquant sur NEXT, on arrive à la page de l’anti-couple (TAIL). Classiquement, il faut cliquer TRIM, régler le bras de servo au neutre, puis cliquer LEFT et RIGHT et bouger le manche pour donner les butées gauche et droite de l’A/C sans que le servo ne force. NEXT pour passer à la page suivante.
En cliquant sur NEXT, on arrive à la page de l’anti-couple (TAIL). Classiquement, il faut cliquer TRIM, régler le bras de servo au neutre, puis cliquer LEFT et RIGHT et bouger le manche pour donner les butées gauche et droite de l’A/C sans que le servo ne force. NEXT pour passer à la page suivante.

![]() on arrive au réglage du cyclique (SWASH) . il faut mettre les pales et l’incidencemètre
on arrive au réglage du cyclique (SWASH) . il faut mettre les pales et l’incidencemètre

La partie gauche de l’écran permet de régler la longueur des biellettes des 3 servos cycliques .
Ensuite sur le côté droit de l’écran, en regardant l’incidencemètre sur les pales , il faut régler d’abord le neutre à 0°, puis le pas maxi et le pas mini. Le logiciel recommande +12 et -12°. Pour mon 450 c’est ce que j’ai fait pour voler sur le dos. ici, comme c’est une maquette, le pas négatif n’a pas besoin d’être si important, mais je le fais malgré tout.
![]() en cliquant sur NEXT, on arrive aux paramètres des capteurs.
en cliquant sur NEXT, on arrive aux paramètres des capteurs.

Pour une maquette, je clique sur scaled-heli (héli- maquette) et je ne touche pas aux autres paramètres

C’est terminé pour les réglages. Il faut cliquer NEXT pour calibrer les capteurs.
Comme il faudra manipuler l’hélico avec le câble USB branché su le PC, j’enlève les pales et je dégage bien le bureau ? le 500X est déjà encombrant !
* Avant ça, je vous conseille de décliquer le contrôle automatique de la tension batterie en bas de page, je vous dirai pourquoi plus loin
-étape 5 : initialiser les capteurs du H1.
il faut pour cette étape simple, torner l’hélico autour de ses 3 axes, et observer la progression des barres vertes sur l’écran. Si vous avez bien bougé lentement dans tous les sens, l’écran suivant vous dira que c’est réussi, vous pouvez vous deconnecter et débrancher le H1

-étape 6 : remontage dans le fuselage
le remontage ne pose pas de problème. Il faut simplement ![]() voir le voyant GPS du H1
voir le voyant GPS du H1 ![]() et faire ressortir le GPS pour le fixer sur le fuselage.
et faire ressortir le GPS pour le fixer sur le fuselage.
J’ai fait un trou au dessus du voyant pour l’observer et une ouverture de 40x18mm pour passer le module GPS de l’intérieur du fuselage vers l’extérieur.

Le câble du GPS est assez long pour lui permettre de passer à l’extérieur du fuselage pendant que j’enfile la mécanique dans la poutre.

La poutre du MD500 est assez large pour y coller le GPS avec la mousse prévue pour ça.

Voilà , c’est prêt à voler !

-étape 7 : test en vol
.![]() allumer l’émetteur l’inter moteur sur OFF, en mode GPS
allumer l’émetteur l’inter moteur sur OFF, en mode GPS![]() brancher la batterie de l’hélico et attendre que le module finisse son initialisation.
brancher la batterie de l’hélico et attendre que le module finisse son initialisation.![]() le voyant du H1 clignote en Vert et jaune.
le voyant du H1 clignote en Vert et jaune.![]() attendre le voyant vert (GPS positionné)
attendre le voyant vert (GPS positionné)![]() pousser les 2 manches de l’émetteur vers le bas et vers l’extérieur
pousser les 2 manches de l’émetteur vers le bas et vers l’extérieur![]() le voyant vert se met à clignoter
le voyant vert se met à clignoter![]() placer l’inter moteur sur ON
placer l’inter moteur sur ON![]() monter doucement le manche des gazs. L’hélico se met en idle-UP il est en pas négatif
monter doucement le manche des gazs. L’hélico se met en idle-UP il est en pas négatif![]() dès que le manche dépasse le centre, le pas devient positif, et l’hélico décolle.
dès que le manche dépasse le centre, le pas devient positif, et l’hélico décolle.
Vous pouvez piloter normalement
![]() Dimanche 18/07/2021, le MD500 est sur le tarmac. je ne suis pas très sûr de mes batteries, donc ce sera un vol très calme.
Dimanche 18/07/2021, le MD500 est sur le tarmac. je ne suis pas très sûr de mes batteries, donc ce sera un vol très calme.

le vent est moyen, mais des rafales à 25km/h . mais pour un 500 ça passe, normalement !

Et voilà le vol. Pardonnez moi la vidéo. j’ai encore dû oublier un réglage !
vidéo ici
de retour à l’atelier, j’augmenterai le gain de l’anti-couple, et je programmerai une vitesse de vol maximum plus importante car le carénage freine bien dans les rafales !
Conclusion : le H1 est mon contrôleur le plus sécurisant que j’ai jamais eu !
Ici, le test de mon Blade450 équipé du H1, en décollage 3D.
Ici, un HIROBO 600 . Mon ami pilote n’a jamais fait d’hélico ! Il est par contre pilote et constructeur de planeurs RC. C’est son premier pilotage hélico. Nous venons d’installer le H1 sur le Hirobo, et vous allez voir que la configuration n’est pas idéale car le retour automatique ne fonctionne pas, et le pilote débutant va ramener et poser l’hélico en mode manuel ..merci H1 !


